") 講述BLDC無(wú)傳感器風(fēng)扇的特點(diǎn)與解決方案
講述BLDC無(wú)傳感器風(fēng)扇的特點(diǎn)與解決方案

聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
傳感器
+關(guān)注
關(guān)注
2573文章
54092瀏覽量
783324 -
BLDC
+關(guān)注
關(guān)注
216文章
897瀏覽量
99532 -
Renesas
+關(guān)注
關(guān)注
0文章
1768瀏覽量
24187
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
普誠(chéng)PT2513A/B三相無(wú)傳感器BLDC馬達(dá)驅(qū)動(dòng)芯片的核心優(yōu)勢(shì)
在小型風(fēng)扇、水泵等設(shè)備的驅(qū)動(dòng)方案中,芯片的能效、兼容性和穩(wěn)定性直接影響產(chǎn)品體驗(yàn)。普誠(chéng)科技推出的 PT2513A/B 三相無(wú)傳感器 BLDC
BLDC與PMSM電機(jī)控制算法的聯(lián)系與區(qū)別
的獨(dú)立、精確控制。
l特點(diǎn): 控制精度高、運(yùn)行平穩(wěn)、效率高。但實(shí)現(xiàn)FOC的前提是需要實(shí)時(shí)獲取精確的轉(zhuǎn)子位置,這必須依賴(lài)高精度的位置傳感器(如光電編碼器、旋轉(zhuǎn)變壓器),這會(huì)顯著增加系統(tǒng)成
發(fā)表于 10-27 09:23
?MCF8316A 傳感器無(wú)感FOC集成FET BLDC驅(qū)動(dòng)器技術(shù)文檔總結(jié)
該MCF8316A為驅(qū)動(dòng)峰值電流高達(dá) 8A 的速度控制 12 至 24V 無(wú)刷直流電機(jī) (BLDC) 或永磁同步電機(jī) (PMSM) 的客戶(hù)提供單芯片、無(wú)代碼無(wú)
?MCT8329A 高轉(zhuǎn)速無(wú)傳感器梯形控制三相BLDC柵極驅(qū)動(dòng)器技術(shù)文檔總結(jié)
MCT8329A是德州儀器(TI)推出的集成無(wú)傳感器梯形控制算法的三相BLDC電機(jī)驅(qū)動(dòng)器
?德州儀器DRV10982-Q1無(wú)傳感器BLDC電機(jī)驅(qū)動(dòng)器技術(shù)解析
Texas Instruments DRV10982-Q1無(wú)傳感器BLDC電機(jī)驅(qū)動(dòng)器是一款集成功率MOSFET的三相無(wú)
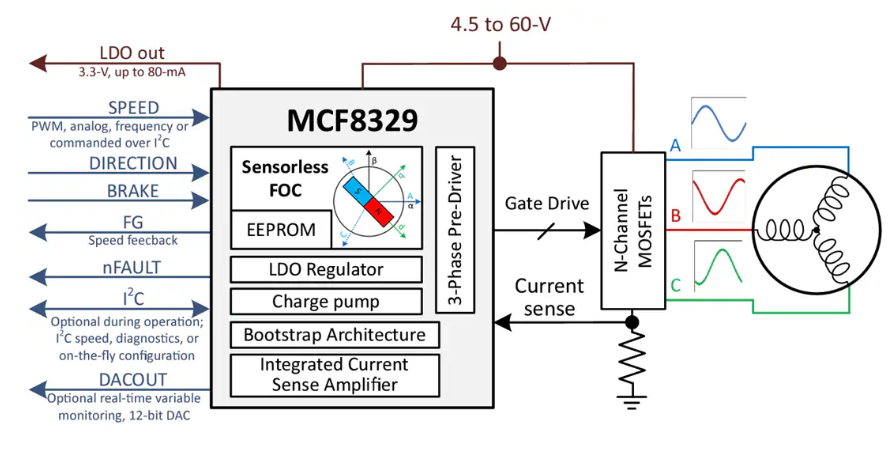
MCF8329A無(wú)傳感器FOC三相BLDC門(mén)極驅(qū)動(dòng)器技術(shù)解析
傳感器FOC解決方案。MCF8329A/MCF8329A-Q1提供三個(gè)半橋柵極驅(qū)動(dòng)器。每個(gè)都能驅(qū)動(dòng)高側(cè)和低側(cè)N溝道功率MOSFET。該器件使用自舉電路,通過(guò)內(nèi)部電荷泵生成正確的柵極驅(qū)動(dòng)電壓。此功能增強(qiáng)了高
基于MCT8315A的無(wú)傳感器BLDC電機(jī)驅(qū)動(dòng)器技術(shù)解析
Texas Instruments MCT8315A FET無(wú)刷直流 (BLDC) 驅(qū)動(dòng)器是單片、無(wú)代碼、無(wú)
德州儀器MCF8315A無(wú)傳感器FOC集成FET BLDC驅(qū)動(dòng)器技術(shù)解析
Texas Instruments MCF8315A FET BLDC驅(qū)動(dòng)器是一款單片、無(wú)代碼、無(wú)傳感器磁場(chǎng)定向控制 (FOC) 控制三相
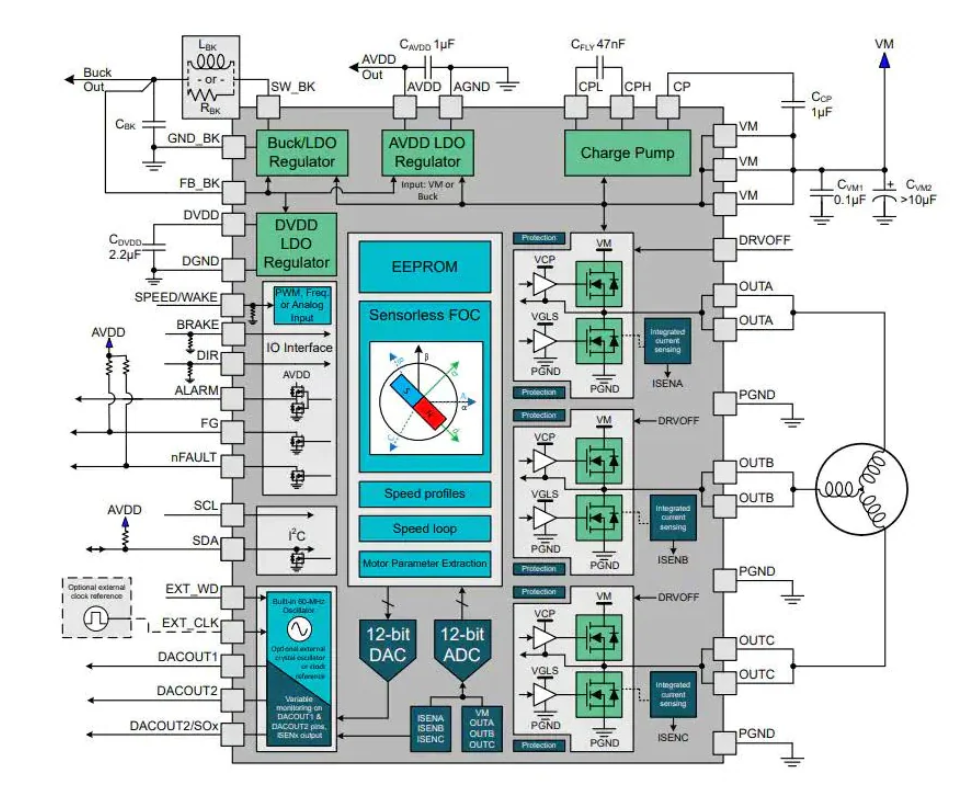
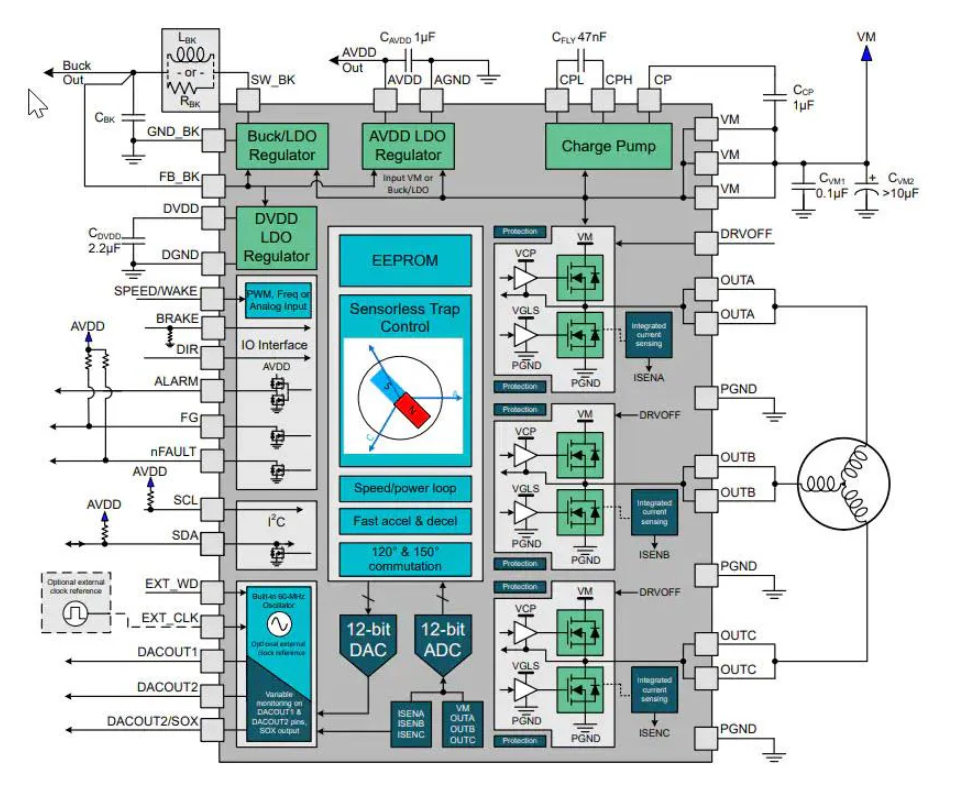
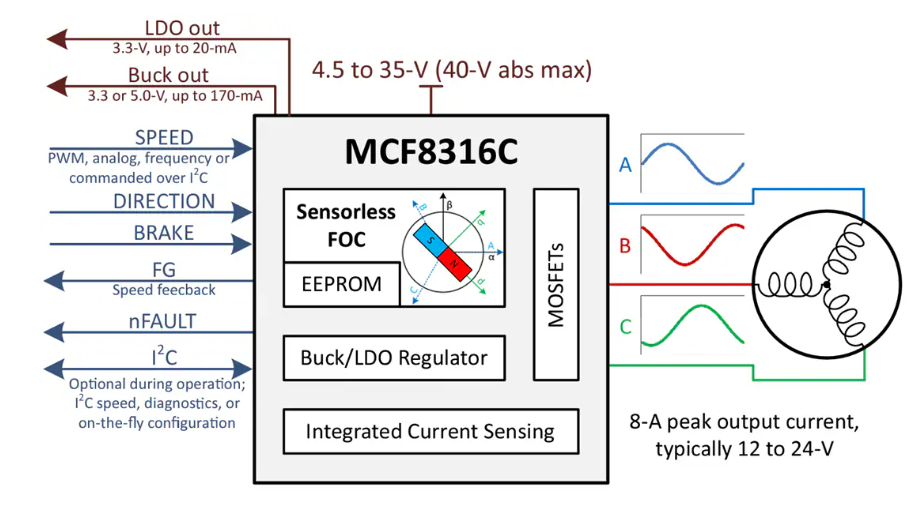
德州儀器MCF8316C-Q1無(wú)傳感器FOC BLDC驅(qū)動(dòng)器技術(shù)解析
Texas Instruments MCF8316C-Q1無(wú)傳感器磁場(chǎng)定向控制 (FOC) 集成式FET BLDC驅(qū)動(dòng)器提供單芯片、無(wú)代碼、
用擇多函數(shù)實(shí)現(xiàn)反電動(dòng)勢(shì)濾波的無(wú)傳感器BLDC
有傳感器控制與無(wú)傳感器控制的對(duì)比由于 BLDC 電機(jī)具有尺寸小、可控制性好、效率高的特點(diǎn),常用于消費(fèi)和工業(yè)應(yīng)用中。
發(fā)表于 08-05 14:25
無(wú)霍爾BLDC控制(有重構(gòu)虛擬中性點(diǎn)方法)
本應(yīng)用筆記介紹了如何使用“端電壓法”來(lái)實(shí)現(xiàn) 120°方波無(wú)傳感器 BLDC 電機(jī)控制器的設(shè)計(jì)。采用“端電壓法”來(lái)檢測(cè)無(wú)
發(fā)表于 08-01 12:19
BLDC無(wú)感控制與有感控制
致力于成為無(wú)刷馬達(dá)驅(qū)動(dòng)行業(yè)的“小巨人”,為智能制造提供高性?xún)r(jià)比解決方案?!钲谄淅煜?b class='flag-5'>BLDC進(jìn)行梯形波控制時(shí),需要檢測(cè)轉(zhuǎn)子磁極位置,根據(jù)檢測(cè)的位置定子線圈進(jìn)行換相通電,形成6步的旋轉(zhuǎn)磁場(chǎng),進(jìn)而
電機(jī)技術(shù)資料—BLDC 電機(jī)控制算法
了更多線的使用和更高的成本。 無(wú)傳感器 BLDC控制省去了對(duì)于霍爾傳感器的需要,而是采用電機(jī)的反電動(dòng)勢(shì)(電動(dòng)勢(shì))來(lái)預(yù)測(cè)轉(zhuǎn)子位置。無(wú)
發(fā)表于 04-01 16:43
無(wú)傳感器磁場(chǎng)定向控制
控制,F(xiàn)OC 控制降低了轉(zhuǎn)矩脈動(dòng),從而消除了轉(zhuǎn)矩脈動(dòng)所產(chǎn)生的噪聲,降低了電機(jī)發(fā)熱,同時(shí)提高了系統(tǒng)效率,增大了最大轉(zhuǎn)矩。本應(yīng)用筆記討論了使用 JMT1808R 控制芯片對(duì)無(wú)刷直流電機(jī)(Brushless Direct Current Motor, BLDC)進(jìn)行
發(fā)表于 03-14 16:26
飛思卡爾三相無(wú)刷無(wú)感電路
本應(yīng)用筆記介紹采用無(wú)傳感器算法的三相無(wú)刷直流電機(jī)(BLDC)控制驅(qū)動(dòng)的設(shè)計(jì)。該設(shè)計(jì)針對(duì)汽車(chē)應(yīng)用。這種經(jīng)濟(jì)高效的解決方案基于飛思卡爾半導(dǎo)體專(zhuān)用
發(fā)表于 03-12 17:47





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論